はじめて制御工学の世界に触れる人は、伝達関数という言葉をよく目にするのではないでしょうか。しかし、伝達関数の導出方法やイメージがつかない方も多いはず。本記事では、制御の初歩的な説明をはじめ、回路モデルとメカモデルの伝達関数の導出例をのせています。伝達関数の理解を深めることができます。
制御とは
制御工学における制御とは、システムの出力を自在に操ることです。ここでシステムの出力とは、車の速度、室内の温度、ロボットの腕の角度や、モータの電流、水槽のみずかさなど数え切れない程あります。
システムの出力を操るためには、システムの挙動を表すモデル式を把握しておくことが重要です。
例えば、モーターに流す電流を制御したい場合、モデル式は電圧方程式になります。電圧方程式などのモデル式は、よく微分方程式で表現されますが、制御工学の世界では伝達関数としての表現が一般的です。
伝達関数とは
伝達関数とは、周波数領域におけるシステムの入力と出力の関係を現したモデル式です。周波数領域とは何かとなるのですが、なじみのある時間領域は、横軸を時間にとりますが(微分方程式は時間領域でのモデル式)、周波数領域は横軸を周波数にとります。周波数領域では、微分と積分を"s"という記号で表現可能です。なぜそうなるかは、別記事で記載しますが、エンジニア目線でいえば伝達関数の扱い方をしることに価値があるため、そこまで深堀りは必要ありません。
具体的にDCモータの電圧方程式を例に考えてみます。
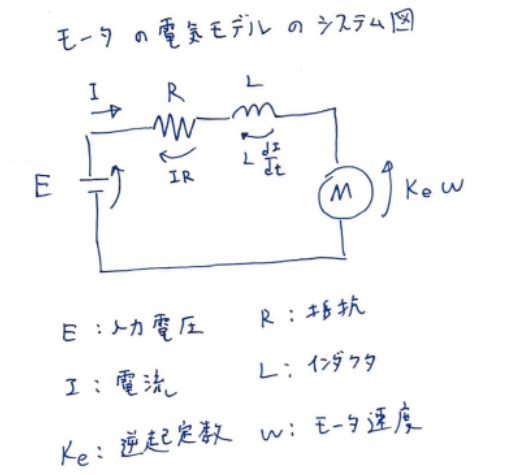
下図は、DCモータの電気モデル図です。
電圧方程式は、抵抗・インダクタによる電圧降下、モータの逆起電圧の総和が入力電圧とつりあうように記述します。
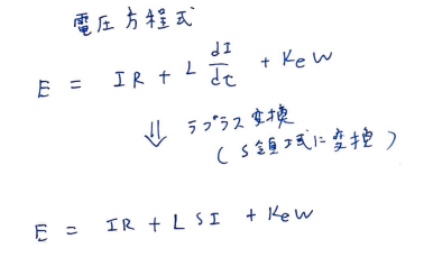
本モデルの電圧方程式を周波数領域に変換した式が以下の通りです。
周波数領域に変換する方法をラプラス変換と呼びます。ラプラス変換することで、微分を"s" 積分を"1/s"で表現可能です。つまり、コイルへの印可電圧の項dI/dtがsになります。
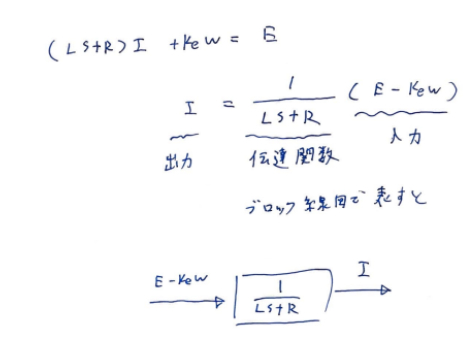
モータの電圧方程式をラプラス変換により周波数領域に変換できました。次に、左辺に出力、右辺に入力がくるように変形します。
モータ電圧方程式の場合、電圧をかけて電流が流れるため入力が電圧、出力が電流になります。
1/(Ls+R)が伝達関数です。確かに入力と出力の関係式になっていると思います。
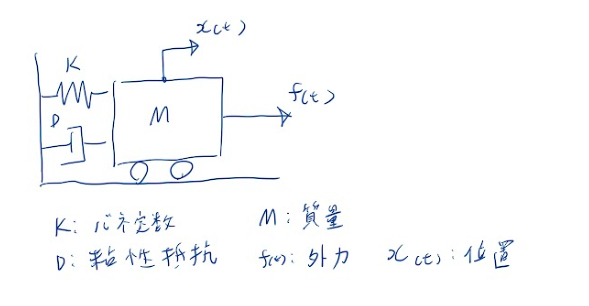
もう一つの例として以下システムの伝達関数を導出してみます。
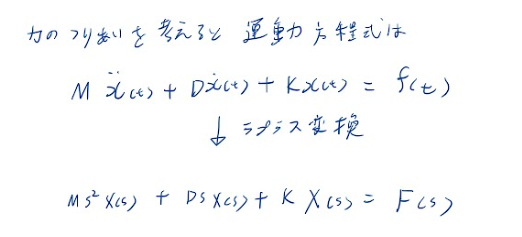
外力f(t)とつりあうように運動方程式をたてればよいため、質量と加速度の慣性力、粘性抵抗による力、ばねによる力の総和を右辺に、外力を左辺に書きます。導出した運動方程式に対してラプラス変換したものがいかの式です。
ラプラス変換後の式は、x,fなどの変数を大文字にするのが通例になります。
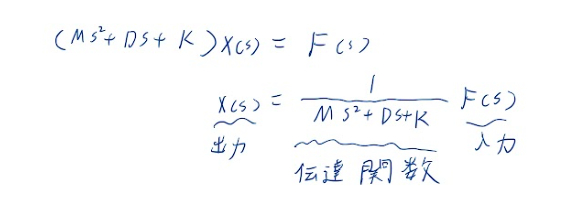
同様に左辺に出力となる位置X(s)、右辺に入力となるF(s)となるように式変形したものが以下です。
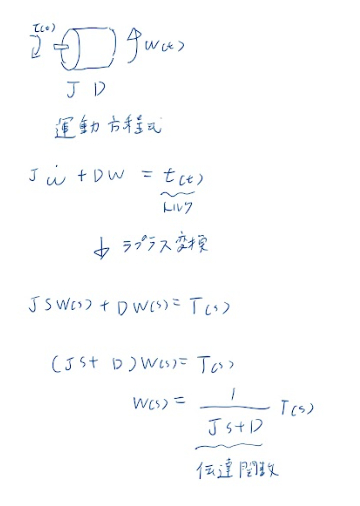
また、入力をトルクT、出力を回転速度ωとした際の回転系のモデルの伝達関数も導出してみましょう。JとDはそれぞれイナーシャと摩擦係数です。トルクに対して、慣性と摩擦が働くためトルクにつりあうような運動方程式になります。
システムをブロック線図で表現
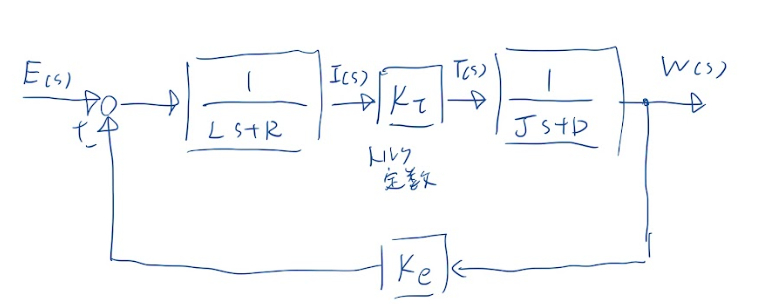
一つ目のDCモータの電圧方程式と回転系の運動方程式を組合すとモータシステム全体をブロック線図として表現できます。ブロック線図とは、システムの入出力関係を図で表現したもので、伝達関数をそのまま記載できるため非常に見通しが良いです。
以下がDCモータのブロック線図になります。システム全体の入力は電圧です。電気モデルの伝達関数1/(Ls+R)からの出力は電流ですがk、トルク定数により変換したトルクが回転系モデルの入力になります。最終的な出力が速度
W(s)です。W(s)と逆起定数Keの積KeWが逆起電圧として入力電圧から減算します。
以上がDCモータのブロック線図表現です。
まとめ
本記事では、制御の初歩的な説明をはじめ、回路モデルとメカモデルの伝達関数の導出例を紹介しました。入力と出力の関係式というものがイメージついたと思います。ぜひ、学業や業務に生かしてください。