サービス
サービスを探す
プロ人材を探す
仕事を探す
ブログを探す

AI・Web システム構築 300,000円〜










AIカテゴリ内 ”初” PRO認定獲得

GPT-4oを用いた麻酔学シミュレーション自動化システム

アペックス会計株式会社様向け「決算書解析AIシステム」

InfluxDB Cloud 上へのPythonデータ送信

自動シフト作成システム
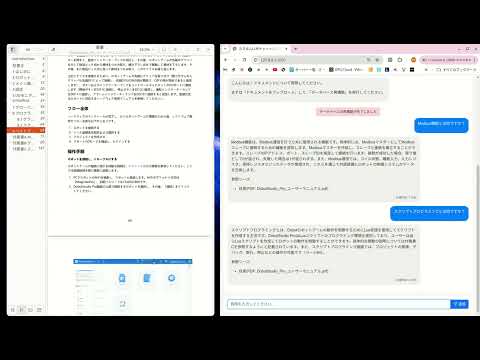
RAGを用いたカスタムLLMチャットボットシステム
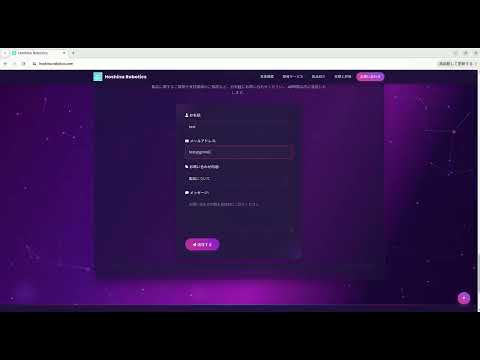
LLMを用いたホームページの制作

UFactory Lite6 速度制御による軌道追従制御
Fusion 360 経験年数 : 4年
Excel 経験年数 : 3年
Google スプレッドシート 経験年数 : 3年
Google スライド 経験年数 : 3年
Google ドキュメント 経験年数 : 5年
PowerPoint 経験年数 : 5年
C++ 経験年数 : 8年
JavaScript 経験年数 : 6年
Python 経験年数 : 8年
Unity 経験年数 : 2年
Vue.js 経験年数 : 3年
Linux 経験年数 : 8年
ROS 経験年数:6年
組み込み開発 経験年数:6年
回路設計 経験年数:4年
・AI・Web システム構築 300,000円〜
実用的なAI・人工知能・LLMシステムの PoC / MVP ~ 大規模システム開発までお受けいたします。
PM1株式会社 2025年9月 〜 現在
・代表取締役 2025年9月 〜 現在
「先端技術を活用した現場改善」を目標に、ロボティクス・AI・Web などの先端技術を活用したプロダクト開発や受託開発を行っています。
ARAV株式会社 2022年3月 〜 2023年12月
・先行開発技術部 / システムエンジニア 2022年3月 〜 2023年12月
「建設機械の自動化」を手掛ける「東大発ベンチャー企業」にて、システムエンジニアとして勤務しました。 非常にスケールの大きな対象物を扱いながら、システム開発に携わらせていただき、重機の自動化に必要な、「制御制御」や「認識技術」など、さまざまな知見を得ることができました。 https://www.youtube.com/watch?v=ItnAtOZFxik 自身が開発したソフトウェアで重機が実際に動作するという、一般的にはなかなか得られないような経験を通じて、これまで「非現実的」と感じていたことも、実現可能なものとして捉えられるようになりました。
TechShare株式会社 2020年4月 〜 2022年2月
・技術部 / システムエンジニア 2020年4月 〜 2022年2月
「ロボットの販売代理店」にて、受託システムの設計・開発を担当させていただきました。 印象に残っている業務としては、建設会社様からの受託開発として担当した、「Web技術 × 組み込み技術」を用いた「ロボットの遠隔操作・自律走行システム」の開発です。 https://www.taisei.co.jp/about_us/wn/2021/210517_8230.html 本件では、システムの設計・開発など、システム開発の全体を担当させて頂きました。 「ソフトウェア × ハードウェア」の複合システムであったため、開発段階では多くの動作不良に悩まされましたが、システムの各要素を一つひとつ安定化させることで、最終的にはシステム全体として安定したものを開発・納品することができました。 このシステムを作り上げるうえで最も重要だった要素は、遠隔操作技術が社会にとって有益であるという確信を持てたこと、そしてその確信により高い熱量を維持し続けられたことだと考えています。
ROS Japan UG #45 ROS10周年 LT大会 2022年2月
ROS Japan UG #49 LT大会 2023年1月
自律走行型草刈り機の実用機開発の取組・新技術推進技術者表彰 2022年7月